


قلب تپندهی هر آسانسور یک الکتروموتور است که نیروی محرکهی لازم جهت حرکت و جابهجایی را تولید مینماید. بر همین اساس حمل وزن کابین و بارهای آسانسور بر عهدهی الکتروموتور آسانسور است. سرعت و شتاب کابین با کنترل و انتقال نیروی موتور انجام میپذیرد. تمامی پارامترهای حرکت از جمله یکنواختی، دستیابی به حداکثر سرعت، کاهش سرعت قبل از توقف و… بستگی به نوع موتور آسانسور (Elevator Motor) دارد. با توجه به کاربرد آسانسور از ترکیبهای متفاوتی از انواع موتور و سیستمهای کنترل سرعت، جهت مدیریت حرکت کابین استفاده میشود.
موتورهای آسانسور به طور کلی شامل دو دستهی موتورهای گیرلس و موتورهای گیربکسی میشود.ساختمان کلی این موتورها نسبتا شبیه به هم میباشد. تفاوت عمدهی این موتور در توان و نحوهی عملکرد آنها در سیستم آسانسور میباشد.
در موتورهای گیرلس نیرو محرکه از طریق اتصال مستقیم روتور به قرقرهی کششی منتقل میشود و در موتورهای گیربکسدار، برای این انتقال نیروی محرکه از فلکه هرزگرد استفاده میشود.در حال حاضر نوع دیگری از موتور آسانسور نیز طراحی و ساخته شده است که هنوز به کاربری و استفادهی عمومی نرسیده است. این موتورها را موتورهای مغناطیسی مینامند
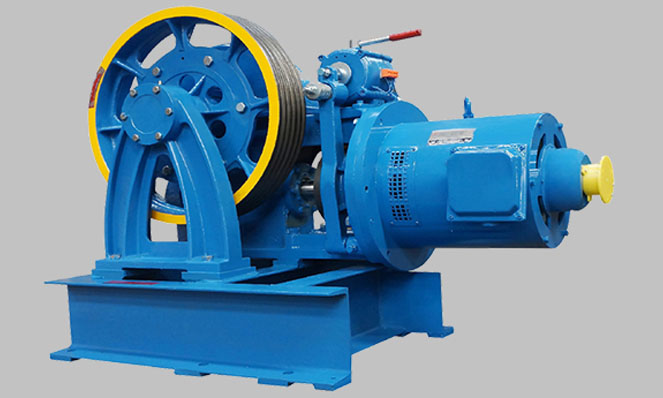
در این موتورها نیروی الکتروموتور توسط یک قرقرهی کششی و چرخدنده به کابین آسانسور جهت بالا یا پایین رفتن منتقل میشود.در این موتورها، گیربکس یا همان چرخدنده، واسط بین موتور و کابین است که انعطافپذیری لازم را بوجود میآورد. وجود چرخدنده باعث افزایش قدرت این موتورها شده است. برق ورودی به موتور باعث چرخش روتور شده و چرخش روتور سبب به چرخش درآمدن گیربکس متصل به روتور میشود.گیربکس این نوع موتورها به وسیله یک میله به روتور متصل است.
چرخش گیربکس باعث به حرکت درآمدن چرخ دندهها میشود و با چرخش چرخندههای متصل به گیربکس، فلکه گیربکس شروع به چرخش میکند و سیم بکسل را موافق جهش چرخش موتور به حرکت در میآورد.
حرکت این مجموعه باعث جابهجایی کابین و همچنین وزنه تعادل آسانسور میشود. قدرت بالا، بازدهی ۸۵% و ارزان بودن نسبت به موتورهای گیرلس، از برتری موتورهای گیربکس دار است. موتورهای گیربکس آسانسور را به دو دستهی دوسرعته و تکسرعته تقسیمبندی میکنند.
در این موتورها نیروی الکتروموتور توسط یک قرقرهی کششی و چرخدنده به کابین آسانسور جهت بالا یا پایین رفتن منتقل میشود. در این موتورها، گیربکس یا همان چرخدنده، واسط بین موتور و کابین است که انعطافپذیری لازم را بوجود میآورد. وجود چرخدنده باعث افزایش قدرت این موتورها شده است. برق ورودی به موتور باعث چرخش روتور شده و چرخش روتور سبب به چرخش درآمدن گیربکس متصل به روتور میشود.
گیربکس این نوع موتورها به وسیله یک میله به روتور متصل است.
چرخش گیربکس باعث به حرکت درآمدن چرخ دندهها میشود و با چرخش چرخندههای متصل به گیربکس، فلکه گیربکس شروع به چرخش میکند و سیم بکسل را موافق جهش چرخش موتور به حرکت در میآورد. حرکت این مجموعه باعث جابهجایی کابین و همچنین وزنه تعادل آسانسور میشود. قدرت بالا، بازدهی ۸۵% و ارزان بودن نسبت به موتورهای گیرلس، از برتری موتورهای گیربکس دار است. موتورهای گیربکس آسانسور را به دو دستهی دوسرعته و تکسرعته تقسیمبندی میکنند.
این نوع موتور، دو سیمپیچ و دو سرعت برای حرکت دارد. هنگام شروع حرکت، از دور تند استفاده میشود.
از یک مقاومت سری برای محدود کردن جریان استفاده میشود که کاهش تدریجی میدان این مقاومت باعث شتابگری آرام آسانسور میشود.
در نزدیکی تراز طبقه، موتور با سیمپیچ دور کند حرکت میکند و سیمپیچ دور تند از مدار خارج میشود.
با نزدیک شدن به تراز طبقه مد نظر، سرعت بصورت تدریجی کاهش مییابد. در نهایت برق قطع شده و با استفاده از ترمز، کابین در تراز طبقه متوقف میشود.
برای کاهش تکانههای شتاب اولیه و ثانویه و همچنین ضربههای توقف، از یک چرخ فلزی به نام فلایویل که به موتور متصل است استفاده میشود.
تکانهها و ضربههای این موتور نسبت به موتور تکسرعته خفیفتر بوده
و همچنین در سیستم آسانسور مجهز به موتورهای گیربکسی دو سرعته، قابلیت دستیابی به سرعتهای بالاتر نیز وجود دارد.

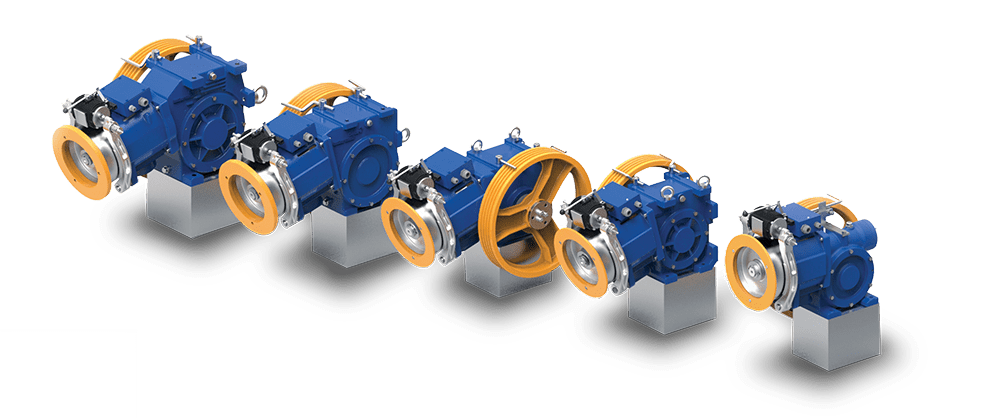
این موتورها، گیربکس (جعبه دنده) نداشته و تغییرِ دور در ساختار داخلی موتور انجام میپذیرد. ساختمان این موتورها سنکرون آهنربایی دائم است. در این موتورها میله متصل به روتور موتور بطور مستقیم به فلکه متصل است. چرخش روتور باعث به حرکت درآمدن فلکه میشود. حرکت فلکه نیز حرکت چپگرد یا راست گرد سیم بکسل را به دنبال دارد. بدین ترتیب موتورهای گیرلس علاوه بر کاهش انرژی میتوانند سریعا تغییر سرعت دهند. این موتورها با کاهش زمانِ حرکت بین دو توقف، مناسبترین گزینه برای آسانسورهایی هستند که نیاز به سرعت بالا یا مواجهه با ترافیک سنگین دارند. از رگلاتور تنظیمکننده در میدان استاتور این موتورها برای شتابگیری آرام استفاده میشود.
وجود یک مقاومت متغیر و کاهش تدریجی آن باعث افزایش فرکانس دَوران استاتور میشود. همین موضوع سبب میشود تا شتابگیری آرام آسانسور تبدیل به حرکتی سریع شود. رسیدن به سرعت نهایی باعث ثابت ماندن فرکانس و دور موتور تا توقف کامل کابین میشود. همچنین در این سیستم برای توقف کابین از یک سری کلیدهای القایی مخصوص استفاده میشود. در این موتورها ترمزها تنها در صورت توقف کامل کابین عمل میکنند. با حذف گیربکس اندازه این موتورها بسیار کوچک گشته، که آنها را قابل نصب در موتورخانههای با فضای محدود میکند.حتی در برخی مواقع نیز میتوان موتورخانه را در این سیستم حذف نمود.
قطعات تشکیل دهندهی سیستم موتور آسانسور الکتروموتور، فلکه اصلی گیربکس و شاسی موتور آسانسور است.
وظیفهی فلکه اصلی آسانسور انتقال توان و در نتیجه جابهجایی سیم بکسل است.
فلکه اصلی خود عضوی از سیستم تعلیق آسانسور بوده و معمولا جنس آن از چدن است.
بین سیم بکسل و شیارهای این فلکه در اثر اصطکاک نوعی نیروی کششی ایجاد میشود. به همین دلیل به فلکه اصلی موتور، فلکه کششی نیز گفته میشود. نیروی کششی ایجاد شده در تناسب با زاویهی پیچش سیمبکسها است. هرچه زاویهی پیچش سیم بکسلها به دور فلکه اصلی بیشتر باشد، نیرویی کششی بیشتر خواهد بود. در این مواقع از یک فلکه ثانویه به نام فلکه هرزگرد استفاده میشود. وجود فلکه هرزگرد باعث کاهش نیروی کششی فلکه اصلی میشود. در فلکه هرزگرد، شیارها نقشی در کشش نداشته و تنها برای هدایت سیمبکسلها به کار گرفته میشوند.
نصب شاسی موتور آسانسور یا فریم زیر موتور نخستین مرحله از نصب سیستم موتور آسانسور است. شاسی موتور باعث برقراری ثبات، عدم انتقال حرکتها و لرزشهای عمودی و افقی موتور به کابین و دیگر اجزای آسانسور و همچنین تراز نگهداشتن قطعات مخلف موتور میشود.
وزن کل سیستم موتور بر روی این سازهی فلزی و فولادی قرار میگیرد. محل نصب این شاسی در موتورخانه است و بر روی آن موتور و فلکه هرزگرد نصب میشود. طراحی این شاسی باید به گونهای باشد که علاوه بر جلوگیری از لزرش و صدایهای اضافی، هرگز دچار خمیدگی نشود. کل سیستم شاسی و موتور نیز بر روی لرزهگیر نصب میشود. لرزهگیر سبب میشود که تکانهها و ضربههای موتور به اجزای ساختمان منتقل نشود. همین موضوع باعث نرمی و روانی حرکت آسانسور میشود.
توان موتور از مهمترین مشخصههاییست که در انتخاب موتور آسانسور باید به آن دقت شود. این توان موتور است که نشان میدهد موتور ظرفیت جابهجایی چه میزان از بار را دارد.
فرمول کلی محاسبه توان موتور آسانسور به صورت زیر است:
در این فرمول P نشانگر توان محاسبه شوندهی موتور است که واحد ان W (وات) است.همچنین V سرعت مد نظر بر حسب m/s (متر بر ثانیه) و G حداکثر وزن هر نفر در آسانسور است. N نیز به عنوان پارامتر موتور، معادل دو عدد ۰.۵ و ۰.۷ در نظر گرفته میشود.
برای پارامتر G نیز باید در نظر داشت که این پارامتر باید بر حسب KP باشد.
به عنوان مثال اگر وزن هر نفر ۷۰ کیلوگرم در نظر گرفته شود، نصف ۷۰ کیلوگرم را که میشود ۳۵ به عنوان پارامتر G در نظر میگیرند.سپس برای ظرفیتهای مختلف آسانسور این متغیر را در تعداد افراد ضرب میکنند.
به عنوان مثال آسانسوری با ظرفیت ۴ نفر مقدار G آن برابر است با:
محاسبهی توان موتور با فرمولهای دقیق صورت میگیرد، اما میتوان به طور تقریبی به ازای هر نفر، حداقل یک کیلووات توان موتور در نظر گرفت.
مثلا برای ظرفیت ۵ نفر یک موتور ۵ کیلووات لازم است. حداقل قدرت موتور ۳.۵ کیلو وات میباشد.
از سال ۱۳۸۷ استفاده از موتور گیربکس VVVF یا موتور گیرلس، جهت جلوگیری از تکانهها و دستیابی به حرکت روان، در بیمارستانها الزامی شده است.
در موتور گیربکس جهت کاهش تکانهی شتاب، چرخ فلزی بزرگ سنگینی به نام فلایویل (چرخ طیار) به موتور متصل میگردد و تا حدی حرکت را نرمتر میکند.
حداقل ارتفاع مجاز کابین در نوع مسافربر ۲۰۰ سانتیمتر و معمولا ۲۲۰ الی ۲۴۰ سانتیمتر میباشد.
شرکت پَریز کوه یگانه (پریز) در زمینه طراحی، مونتاژ، نصب و راهاندازی و سرویس و نگهداری آسانسور و پلهبرقی، با استفاده از مدیران تحصیلکرده و مجرب به همراه گروه فنی متخصص و باسابقه، در سال ۱۳۹۰ با شماره ثبت ۴۲۲۲۲۳ تأسیس گردید.
منو
ارتباط با ما
طراحی سایت و سئو توسط: Ahmadimani.com

